Investigadores de la Universidad de Washington han creado la mano robótica más parecida a una mano humana que existe, y los motivos detrás de este desarrollo son muy interesantes.
¿Deben los robots parecerse a los seres humanos? No necesariamente, e incluso podría decirse que al intentar imitar la forma humana, estamos limitando las posibilidades de los robots.
Por otra parte, no es casualidad que los seres humanos tengamos el aspecto que tenemos ahora; millones de años de evolución han dado lugar a un ser con un cierto número de extremidades y con un cuerpo con una cierta forma gracias al cual hemos llegado a donde estamos.
Cómo funciona la mano robótica más parecida a una mano humana
Pongamos como ejemplo la mano. Sólo hace falta fijarse para darnos cuenta de que su complejidad es asombrosa, y que es capaz de realizar tareas que ningún otro animal consigue; así que lo lógico sería que las manos de un robot imitasen a las de los humanos.
El problema es la mencionada complejidad, que provoca que los ingenieros acaben optando por diseños simplificados pero que consiguen mas o menos el mismo efecto.
Los investigadores Zhe Xu y Emanuel Todorov se han propuesto dejar atrás esos diseños simplificados, y tirar la casa por la ventana; el resultado es la mano robótica más detallada y fiel mecánicamente hablando a una mano humana.
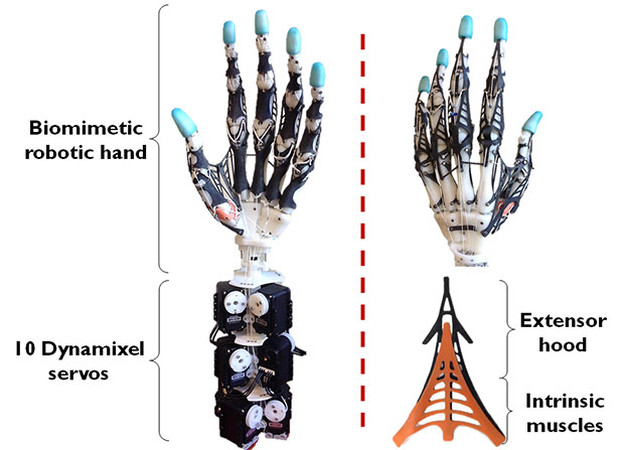
Para conseguirlo partieron de un escáner láser de una mano humana para comprender su estructura. Los “huesos” fueron creados con impresión 3D, y gracias a que son idénticos a los de la mano humana los investigadores pudieron montar el resto de componentes sobre esta estructura con gran precisión.
Una parte donde realmente se nota esta decisión es el pulgar. Hasta ahora ningún proyecto ha conseguido igualar la libertad de movimientos de nuestro pulgar, que depende de la forma irregular del hueso trapecio.
Es por esto que las uniones mecánicas que se usan normalmente estén muy limitadas en el pulgar; en cambio este proyecto ha copiado esta forma irregular del hueso, lo que sumado a las uniones artificiales idénticas a las naturales, permite que el pulgar se mueva prácticamente igual que el de verdad.
La única parte que no se parece mucho a la mano humana son los músculos, que en esta mano son 10 servomotores en lo que sería “el brazo”. La mano se controla a distancia, siguiendo los movimientos de un guante que controla el operador. Seguir leyendo Esta mano robótica es tan parecida a una mano humana que da algo de miedo