Vuelven los robots de Boston Dynamics, la nueva generación se llama Atlas Robot y es el más avanzado hasta la fecha.
La gente de Boston Dynamic vuelve a la carga enseñándonos sus últimos avances en robots. En los últimos meses y años, han ido sorprendiéndonos con robots más potentes, capaces e imponentes, aunque también se hacen querer felicitándonos la Navidad.
La compañía, que forma parte de Alphabet (Google) tiene nuevos “juguetes”, se llamas Atlas Robot, pueden mover objetos, son autónomos y dan más miedo que nunca.
El perro robótico de Google se entrena con los Marines de EEUUEl perro robótico de Google se llama Spot y ya está entrenando con el cuerpo de Marines de los EEUU.

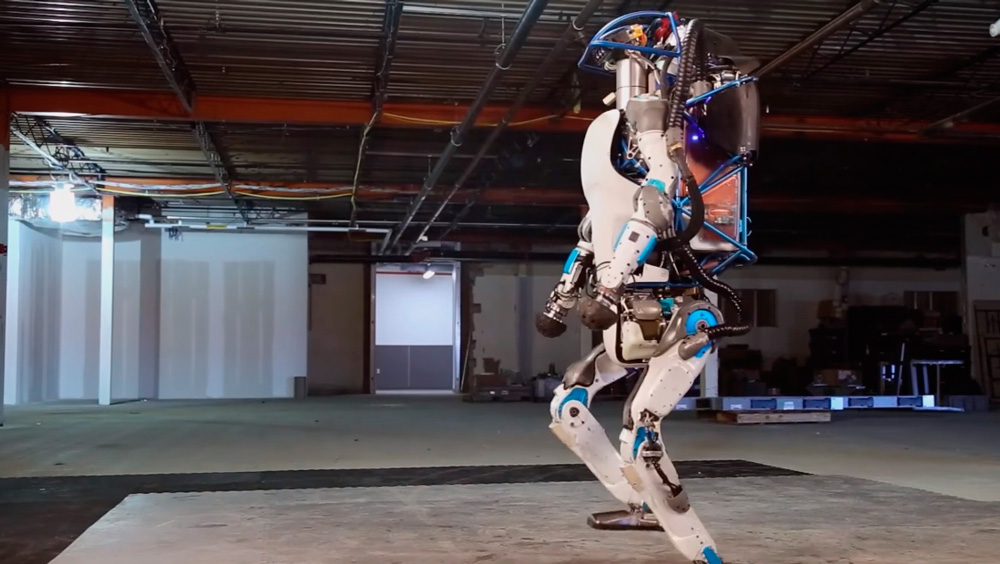
El ATLAS robot fue diseñado inicialmente para la competición de robótica de DARPA y se trata de un salto enorme con respecto a los que habíamos visto hasta ahora. El Atlas se sostiene sobre dos patas robóticas, es algo así como un robot futurista sin cabeza, que da la sensación que en algún momento se va a rebelar contra la humanidad.
Un día se rebelarán
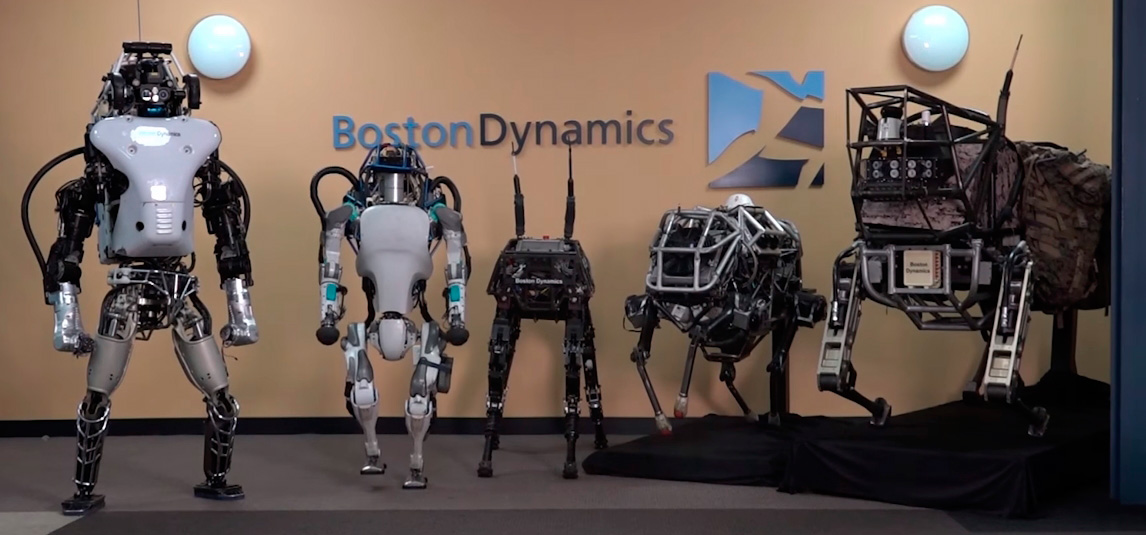
En el vídeo que han publicado, podemos verlo junto al resto de generaciones de robots de Boston Dynamics y se puede apreciar a la perfección cómo han avanzado entre el AlphaDog, WildCat, BigDog, el anterior Atlas y la nueva generación de este.
El nuevo Atlas es un robot diseñado para operar en interiores y exteriores, es completamente eléctrico y sus mecanismos de movimiento son hidráulicos. Tanto en el cuerpo como en las extremidades tienes sensores que funcionan junto al LIDAR de su cabeza para saber su posición en el entorno, analizarlo, detectar objetos y obstáculos.
Ver vídeo
Tiene una altura de 1.75 metros y pesa unos 82 kilogramos, lo que supone una gran evolución con respecto al anterior. La dieta le ha sentado bien, porque el primer atlas media 1.90m y pesaba casi 160 kilos.
Al igual que ocurría con los robots tipo “Dog” (lo que van a cuatro patas), el Atlas es capaz de mantener el equilibrio incluso cuando se trata desestabilizar a base de empujones, pero en caso de tirarlo al suelo, puede volver a recuperar la verticalidad en segundos. Un día se cansará de tantos golpes y jugarretas e irá a por el que se las hace. Al tiempo.
Un algoritmo para salvar a los robots de las caídasEstán desarrollando un algoritmo para salvar a los robots de las caídas, porque saber caerse también es importante.

La entrada El nuevo robot de Boston Dynamics nos hace temer todavía más por la humanidad aparece primero en Omicrono.
Seguir leyendo El nuevo robot de Boston Dynamics nos hace temer todavía más por la humanidad